�\ՄRTK���g��Сˮ�������еđ���
���ٙ�Ŀ��ˮ��Փ�� �l�����ڣ�2011-01-12 08:31 ��ȣ�
����ժҪ:�S���Ƽ��IJ����M����ȫ���l�Ƕ�λϵ�yGPS�ڜy���I��õ��lչ���e�ǽ�����RTK���ܵIJ������ƣ�RTK���ǵõ���ҵ��Hه�����������Σ����ȸߣ�Ҳ��Ҵ_���p���˲��ٹ������������Ч�档RTK���g�M�п��Ɯy����׃�˂��y�ďĸ����ͼ������I��ʽ������ֱ�����������c��ֱ�Ӳ��O�D���c���`��o�e�ۡ�
�����P�I�~:GPS��RTK�����ȣ�ˮ�����̣�
����
����һ�J�R�ׂ���������
�����҂�֪����GPS�Ķ�λԭ���������ÿ��g�ֲ����l�ǣ�21�w�����l��+3�w�����l�ǣ��Լ��l���c�����c�ľ��x�����ó������c��λ�ã��༴���g�ľ��x����ԭ�����䶨λ�������Յ����c��λ�ò�ͬ�ɷ֞�^����λ��������λ��
����GPS�^����λ�ֽІ��c��λ������GPS�l�Ǻ��Ñ����ՙC�쾀��WGS-84����ϵ������������ԭ�c�������|�ģ��Ľ^��λ�á������Ñ����ՙC�쾀��̎�Ġ�B��ͬ���֞��o�B�^����λ�̈́ӑB�^����λ���o�B�^����λ�ľ��Ȟ�������Ҫ���ڴ�y�������ӑB�^����λ�ľ��Ȟ�10��40m��ֻ������һ���ԵČ�����λ�С�
����GPS������λ���Ã��_GPS�քe�����ڻ����ăɶˣ�ͬ���^�y��ͬ���l�ǣ�ͨ�^�ɜyվͬ���ɼ�GPS���������^����̎���Դ_�������ɶ��c������λ�ã��������������������λ�^���н��ՙC�쾀��̎�Ġ�B��ͬ��GPS������λ�֞��o�B������λ�̈́ӑB������λ���o�B������λҲ�����҂����f��GPS�o�B�y��������ͨ�^���ՙC�L�r�g�B�m�^�y�@�ó�ֵĶ����^�y���������������������ÿ����c������ֵ���������^�̺��s��һ����ܛ�������M�С��@��Ͳ����ˡ����ӑB������λҲ�Q����GPS��λ�������ṩ���������Ļ���վ�Ĕ�����ͬ���ɷ֞�λ���վ��ֺͶ����վ��֣��λ���վ��ָ�������վ���l�͵�������������Ͳ�ͬ�ַ֞�λ�ò�֡��ξ��֡��d����λ��֡��d����λ����ַQRTK���g��ͨ�^���ɜyվ���d����λ�^�yֵ�M�Ќ��r̎�������Ԍ��r�ṩ�������ȵ����S���ˡ���̎���^�̺��s��һ���ÙC��ܛ���Ԅ��M�С��@��Ͳ����ˡ���
��������RTK���g���J�R
�����d����λ��ֵĻ���ԭ���ǣ��ɻ���վͨ�^����朌��r�،����d����λ�^�y��������վ������Ϣһͬ�l�͵��Ñ�վ���Ƅ�վ�������c�Ñ�վ���Ƅ�վ�����d����λ�^�y���M�в��̎�������r�ؽo���Ñ�վ���Ƅ�վ���ľ��_���ˡ�
�����cRTK����P���`�
�������c�o����������P���`��
�������ڌ�ʩ�ӑB���GPS��λ���g�ı�y��_����ֱ�ӂ�ݔ�����l��UHF����_���ڂ�ݔ�ŵ��Ȳ���������ɵķ�̖�g�ɔ_�����ɱ���ؕ��a���e�ʹ��RTK���ӽ��ՙC�����`�a����Ϣ��Ӱ�RTK��λ�Y�������_�ԡ��@��`��ɚw�{�飺1�������Ϣ�{���`�2�������Ϣ�{���`�3�����h���ɔ_Ӱ푡��������ؿ�ͨ�^�x����{���{�ƽ��{�����P���������`�a�ʿ�������С����֮�ȣ������Ɍ��`�������10-9��������
�������c����վ�����^�y���I���P���`��
����RTK�ӑB���I�r�d�w˲�r�ˑB����������һ���Ҫ���`���Դ���M�ЄӑB�^�y���I�r���ڴ����cP�ϟo�����r�_���쾀�ӑB˲�r�ˑB��
������D��ʾ�������¶Ȼ��쾀���ЗU�Aб�ˑB��ʹP�c�U������Aƫ��B��������ƽ��߳��`�����ˑB�����քe���P�͡�h,��С�r,�ɰ��D��������`�����ģ��:
������P=h0•sin
������h=h1+h2=h0(sec-1)+h2
����
����ʽ�С�P---�ˑB�Ǽ��¶������ƽ���`��;
������h---�ˑB�Ǽ��¶�����ĸ߳��`��.
������ȡh0≤2m��≤5°�r���ˑB�������ƽ���`���P���±���
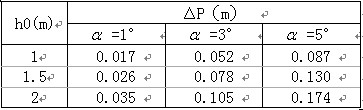
�����ı��п��Կ������ˑB�������ƽ���`���P�S�ˑB�Ǻ��쾀�߶ȵ������Ѹ�����ӡ����HRTK���I�r�����M���ڴ����c�����o�B��ʄӑB��ʽ��ƽ���кʹ_�������쾀�߶���1.5m���¡���ô�@��`�����������±1cm���ҡ�
����һ����Ե��汾���IJ�Ҏ�t�������3cm�ԃȣ���ȡh0≤2m��≤5°��h2=0.030m�r���ˑB������ĸ߳��`���h���±���
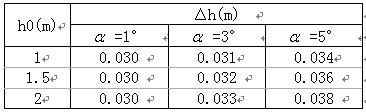
�����ı��п��Կ������ˑB������ĸ߳��`���h��Ҫ�܁��Եر������IJ�Ҏ�t���׃��Ӱ푡����HRTK���I�r�����M���ڴ����c�����o�B��ʄӑB��ʽ��ƽ���кʹ_�������쾀�߶���1.5m���¡���ô�@��`�����������1cm���ҡ�
���������H��������
����2007��12�£��҆�λ�нӺ���ʡ�»οhɼľ��ˮ�վ�Ŀ��y���OӋ��ԓ������һ����ˮʽ�l늹��̣��д�Ρ��S����1.7�����L������_�ڣ�����λ�Ì�������^���ɽ�X�^������c�S��֮�g�кÎ�����ɽ�����������ʽ���ǜy���ķ����������ƾW���ǹ��������ஔ�Ĵɮ��r�r�g�ܾo�ȣ����]��RTK�ľ��Ȟ飺ƽ�澫��1cm+Dppm,��ֱ����2cm+Dppm����ȫ�M���҂�ˮ��ˮ늹��̜y��Ҏ�����ȡ������҂��Q����RTK�����ƣ��ȰѴ�Ρ�����M���ڡ��S���εĵ��ΈD�Լ�ˮ���^�ȵ��͛]�{��ȹ������ꡣ�Ժ�����GPS�o�B���Ɯy�����҂�����E��GPS�W�˜��ژм~���ֹ����O��5������̖�քe�飺SC1��SC2��SC3��SJ0��SJ3�������c�����wҊ�����cƽ�沼�ÈD����
����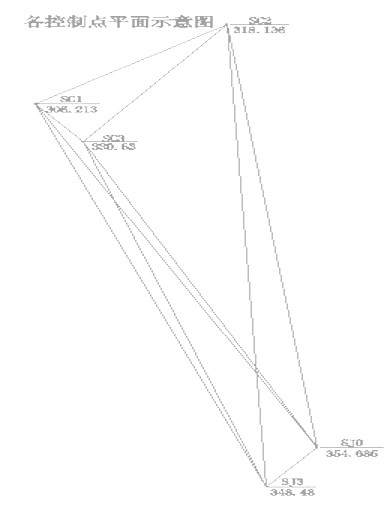
��������ˮ�ʃx�����ĵ�ˮ��Ҫ�քe�������M���ڸ��������O��һ��ˮ���c������ʩ���ŘӸ߳�ԭ�c���y��SC1�c��ˮ�ʸ̞߳�306.213�ס�Ȼ���҂���SC1(3029.26,36623.96��306.213)�c����c,�ÑҒ��_�P����λ�ǽ�����һ������ֱ������ϵ�y����2″������ȫվ�x���y��SC2�����˞�(3462.221,37265.857��318.224)��������ʼ����SC1—SC2���҂����к��_HD-5800G�M��RTK�y��������D�Q�������Ì��c�����вɼ��������c����ɹ����±�
�����Դ˳ɹ�,�҂���������е���I������
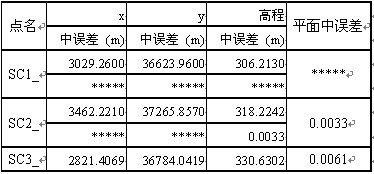
�������]���������_�ڣ����ҘI��Ҫ���ṩ�y���ɹ������������҂��ڹ����_��ǰ����GPS�o�B�y������3�_�o�BGPS���������������ΈD���M���^�y��SC1-SC2-SC3��SC1-SC2-SJ0��SC1-SC2-SJ3��SC2-SJ0-SJ3��SC3-SJ0-SJ3��ÿ�yվ�^�y�r�g������50��犡�ͨ�^HDS2003����̎��ܛ��̎�������ƽ��Y�����£�
������K����ƽ��ֵ
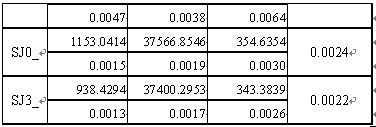
���������cƽ�����`��

����
��������K����ƽ��ֵ�ɹ�������RTK�y���ijɹ��cGPS�o�B�y���ijɹ�������ͬ��ͨ�^���^��SC3�cƫ��0.012m��SJ0�cƫ��0.011m��SJ3�cƫ��0.015m��
�������OSC3�c�ϵ����`���lj��ӵģ���ô��������߅��SC1-SC3���������`��=��0.0061+0.012��/262.353=1/14494��Ҳ�ܝM��Ҏ����Ҫ����҂��oʩ�����ύ���o�B�y���ɹ������^����һ���ʩ�������������g���؞ͨ��
�����ĽY���Z
����ͨ�^����Č��H�����c�\�ã����ĹP�ߵó��YՓ:��RTK���g�y����Сˮ�������в��H�����鲿�c�y����ʩ���Řӡ���^�̜߳y���������������Ɯy�����ڵ����������Ɯy���r��һ��Ҫ�Ì��c��������ƽ����Ҫ�x��õĕr�Σ������ڹ̶�����`����С�r�ɼ�������
���������īI
����[1]��GPS�y�����g���S��ˮ����������������
����[2]��ˮ��ˮ늹��̜y��Ҏ����SL197-97
����[3]��Т܊�����ưl��GPSRTK���g�Ĝy������̽ӑ[J]�������L���� Փ��
�����}���\ՄRTK���g��Сˮ�������еđ���
�D�dՈע�����ԣ�http://www.optiwork.cn/fblw/ligong/shuili/6396.html
���P���}���
�zӰˇ�g�I��AHCI�ڿ����]��Phot...�Pע:106
Nature���¶��W���ӿ�Nature Com...�Pע:152
��С�W�̎�ֵ���˽⣬�@Щ�����W...�Pע:47
2025�ꌑ����WՓ�Ŀ����õ�19��...�Pע:192
�y�L�I��Ƽ������ڿ��x�� �p����...�Pע:64
���r�_Փ�ęz���C������Ҫ�Pע:52
�Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ����Pע:54
���H������Ҫ�˽�Ć��}����Pע:58
���������ܷ��u�Q���Pע:48
��ŌW����Щ��Ͷ���SCI�ڿ���ֵ...�Pע:66
ͨ�Ź����ИIՓ���x�}�Pע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�Pע:121
�u�Q�lՓ�ĺ�߀�dz������Pע:68
��ӡ���Y����Ҫ�D�d��Դ�ڿ���...�Pע:51
����Փ�ķ���
�����OӋՓ�� ����Ҏ��Փ�� �V�IՓ�� �C�һ�w��Փ�� ���bՓ�� ��ͨ�\ݔՓ�� ����Փ�� ���Փ�� ˮ��Փ�� �Ԅӻ�Փ�� ܇�vՓ�� ұ��Փ�� ���I�OӋՓ�� �CеՓ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^
- MEAT SCIENCE�ڿ������п�Ժ�օ^
- MECCANICA�п�Ժ�ׅ^
- MECHANICAL ENGINEERING�п�Ժ�օ^
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^
- Mechanics of Solids�п�Ժ�օ^
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^
- MECHATRONICS�s־���п�Ժ�ׅ^